Moving obstacles make robot navigation more difficult. Typically local planning is required as it is not possible to work out a complete route ahead of time. Robots may try to predict the path of moving obsacles, but also employ avoidance rules if it comes too close.
Used in Chap. 15: page 234
Used in glossary entries: local planning, obstacle avoidance, robotics
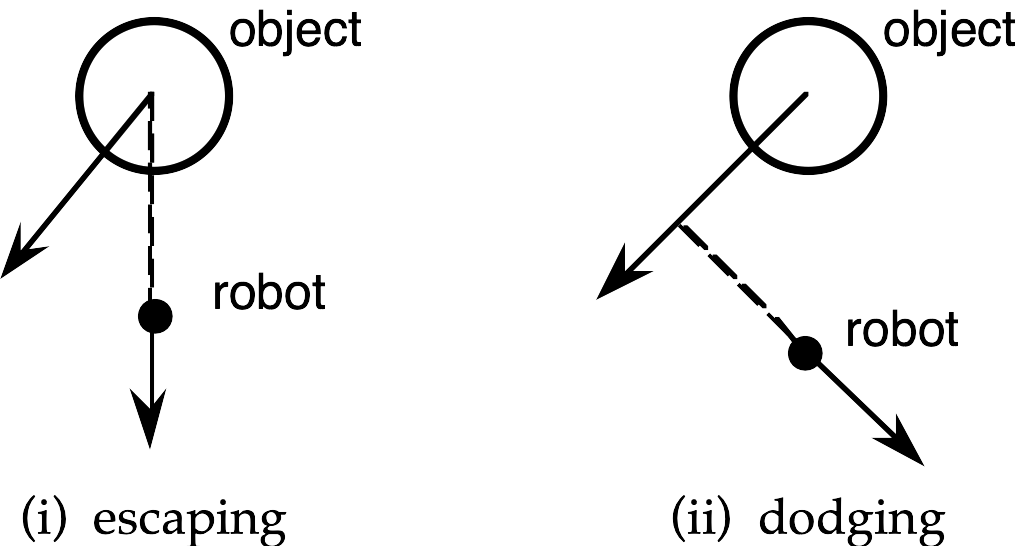
Avoiding moving objects.